2021-07-10opencv 手眼标定理论 摘要手眼标定一般用于机械臂和相机之间的坐标变换关系。手眼标定一般有两种情形,一种是眼在手上的手眼标定,相机固定在机械臂上,随机械臂一起移动;一种是眼在手外的手眼标定方法,相机固定在机械臂外,相机固定不和机械臂一起动。眼在手上主要标定机械臂末端end到相机cam之间的转移矩阵;眼在手外主要标定相机和机械臂基座之间的转移矩阵。[x] Edit By Porter, 静以修生,俭以养德,非淡泊无以明志,非宁静无以致远。visionAlgorithmcalibrationvision阅读全文 >>
2021-06-04单目相机内参标定理论 摘要视觉任务中,相机取图往往都会因为相机畸变问题,导致图像发生畸变。图像的畸变会导致视觉进行目标定位产生位置的识别偏差,如何解决这一偏差问题,就是相机内参标定需要解决的问题。在线的棋盘格生成地址:Calibration Checkerboard Collection[x] Edit By Porter, 积水成渊,蛟龙生焉。visionAlgorithmcalibrationvision阅读全文 >>
2021-03-062.19 YOLOV1 摘要《You Only Look Once: Unified, Real-Time Object Detection》论文地址:https://arxiv.org/abs/1506.02640代码地址:https://github.com/pjreddie/darsummarydl阅读全文 >>
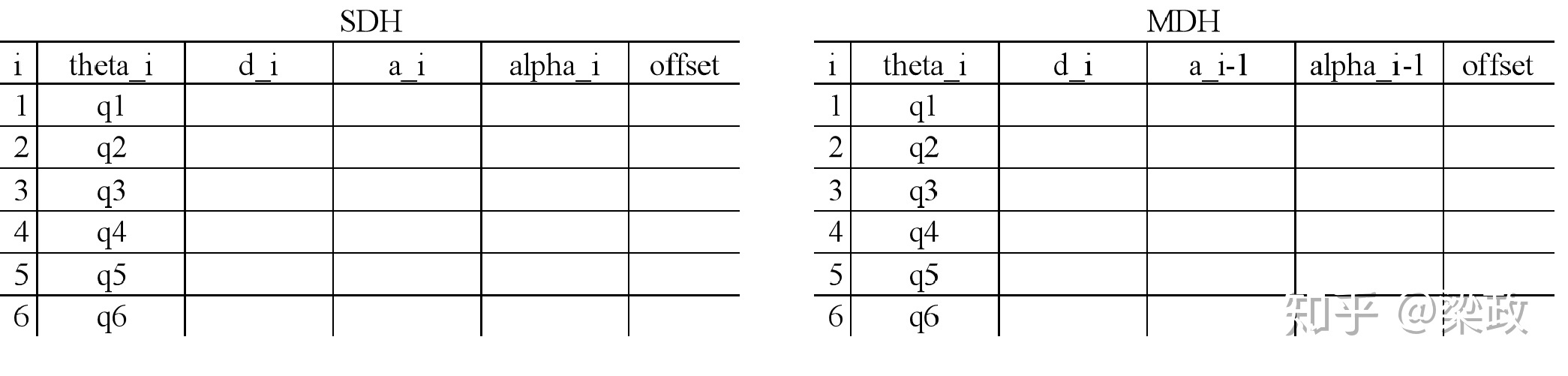
2021-03-05机械臂DH参数 摘要D-H法的简化方式很明确,就是将y轴位移和旋转的2个自由度干掉了,仅考虑x和z轴的位移与旋转。这样,6个自由度的位姿变成由4个参数来表示了。其中参数采用关节角(Joint Angle) θ\thetaθ 、连杆偏移(Link Offset)ddd 、连杆扭转角(Link Twist) α\alphaα 、连杆长度(Link Length) aaa 共4个参数来表述相邻两个坐标系的关系。这4个参数可以分为两组。在移动关节下可变参数 α\alphaα 是关节参数(Joint Variable)(移动关节的话,可变参数是 ddd )。另一组是系统固有参数连杆参数(Link Parameters) α\alphaα 、 aaa 和 ddd 。[x] Edit By Porter, 积水成渊,蛟龙生焉。visionAlgorithmcalibrationvision阅读全文 >>
2020-12-222.17vscode新建工程 摘要vscode 中新建工程launch.json用于设置调试、运行时的东东task.json用于设置编译时的东东summaryvscode阅读全文 >>
2020-12-222.16CMakeLists学习笔记.md 摘要CMakeLists中add_executable(可执行文件, src1,src2,src3…)summaryCMakeLists阅读全文 >>
2020-12-02yolo进行数据训练2 摘要本文主要记录Ubuntu下yolov4数据的训练安装opencv4安装opencv_contrib样本标注生成yolov4需要的数据集配置GPU修改yolov4网络配置参数开始训练默认前三步制作结束,本文主要从第四步生成YOLOV4所需要的数据开始[x] Edit By Porter, 积水成渊,蛟龙生焉。DQNDeep Learningrecognition阅读全文 >>
2020-11-11yolo进行数据训练 摘要本文主要记录Ubuntu下yolov4数据的训练安装opencv4安装opencv_contrib制作训练数据集生成yolov4需要的数据集配置GPU修改yolov4网络配置参数开始训练笔记主要记录一些指令和相关的配置[x] Edit By Porter, 积水成渊,蛟龙生焉。opencvDeep Learningrecognition阅读全文 >>