
摘要
| 论文 | https://arxiv.org/pdf/2206.07389.pdf |
|---|---|
| code | https://github.com/cfzd/Ultra-Fast-Lane-Detection-v2 |
| 时间 | 22 |
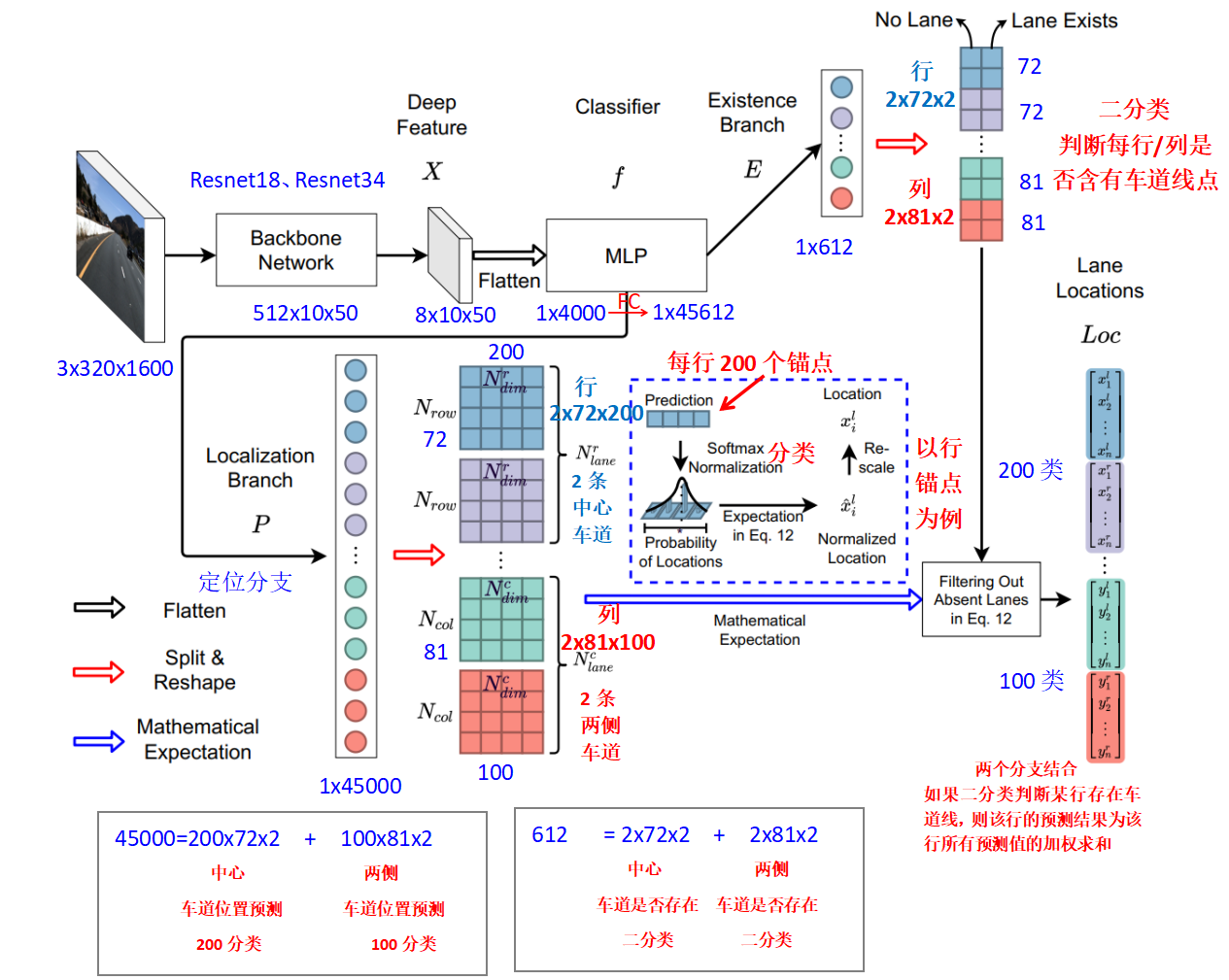
| 优势 | 基于row anchor 对于垂直车道线好,基于col对于扁平的车道线好。 |
| 状态 | 待开始 阅读中 已读完 |
概论
- [x] Edit By Porter, 积水成渊,蛟龙生焉。
| 论文 | https://arxiv.org/pdf/2206.07389.pdf |
|---|---|
| code | https://github.com/cfzd/Ultra-Fast-Lane-Detection-v2 |
| 时间 | 22 |
| 优势 | 基于row anchor 对于垂直车道线好,基于col对于扁平的车道线好。 |
| 状态 | 待开始 阅读中 已读完 |
RANSAC(RAndom SAmple Consensus,随机采样一致)
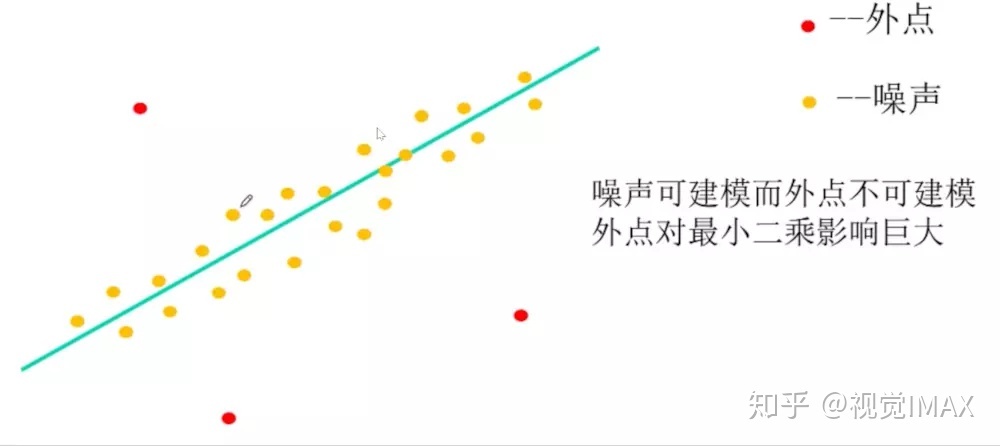
ransac algorithm,在可能存在无匹配的情况下,我们更倾向于使用ransac(random sample concensus, RANSAC)来求解,而不是最小二乘法。RANSAC 算法是一种通用的做法,适用于很多带错误数据的情况,可以处理带来错误匹配的数据。
《视觉slam十四讲》–7.4节。
简介
RANSAC(RAndom SAmple Consensus,随机采样一致)算法是从一组含有“外点”(outliers)的数据中正确估计数学模型参数的迭代算法。“外点”一般指的的数据中的噪声,比如说匹配中的误匹配和估计曲线中的离群点。所以,RANSAC也是一种“外点”检测算法。RANSAC算法是一种不确定算法,它只能在一种概率下产生结果,并且这个概率会随着迭代次数的增加而加大(之后会解释为什么这个算法是这样的)。RANSAC算最早是由Fischler和Bolles在SRI上提出用来解决LDP(Location Determination Proble)问题的 。
PNP问题的描述以及定义是相对简单的,他的目的就是求解3D-2D点对运动的方法。简单来说,就是 在已知n个三维空间点坐标(相对于某个指定的坐标系A)及其二维投影位置的情况下,如何估计相机的位姿(即相机在坐标系A下的姿态)。
举个例子,我们在一幅图像中,知道其中至少四个图像中确定的点在3D空间下的相对坐标位置,我们就可以估计出相机相对于这些点的姿态,或者说估计出这些3D点在相机坐标系下姿态。(上述说的姿态或者位姿,包括位置以及方向,即一个6自由度的状态)
PnP 问题有很多种求解方法,例如用三对点估计位姿的 P3P 、直接线性变换(DLT)、EPnP、SDP、UPnP。此外,还能用非线性优化的方式,构建最小二乘问题并迭代求解,也就是万金油式的 Bundle Adjustment 。
在SLAM的众多传感器解决方案中,相机与IMU的融合被认为具有很大的潜力实现低成本且高精度的定位与建图。这是因为这两个传感器之间具有互补性:相机在快速运动、光照改变等情况下容易失效。而IMU能够高频地获得机器人内部的运动信息,并且不受周围环境的影响,从而弥补相机的不足;同时,相机能够获得丰富的环境信息,通过视觉匹配完成回环检测与回环校正,从而有效地修正IMU的累计漂移误差。
相机与IMU之间的外参包括两部分:
如下图所示,相机与IMU之间的相对位姿值的是相机坐标系和IMU坐标系之间的变换,包括相对旋转角和相对平移量。

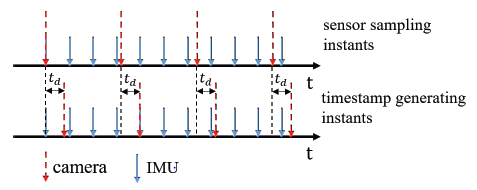
由于触发延时、传输延时的存在,传感器的采样时间和时间戳的时间不匹配,如下图所示,从而导致相机和IMU之间存在时间差td。
单一传感器不可避免的存在局限性,为了提高系统的稳健性,多采取多传感器融合的方案,融合又包含不同传感器的时间同步和空间同步 。
激光雷达和相机的联合标定就属于空间同步范畴。
目前做相机和激光雷达的标定工具有很多,例如:开源无人驾驶软件Autoware,apollo,lidar_camera_calibration, but_velodyne
还有calibration_camera_lidar calibration_camera_lidar,从autoware分离出来的相机雷达联合标定ros包。
激光雷达和相机联合标定还需要对相机进行标定,比如常见的棋盘格 相机内外参标定。