
摘要
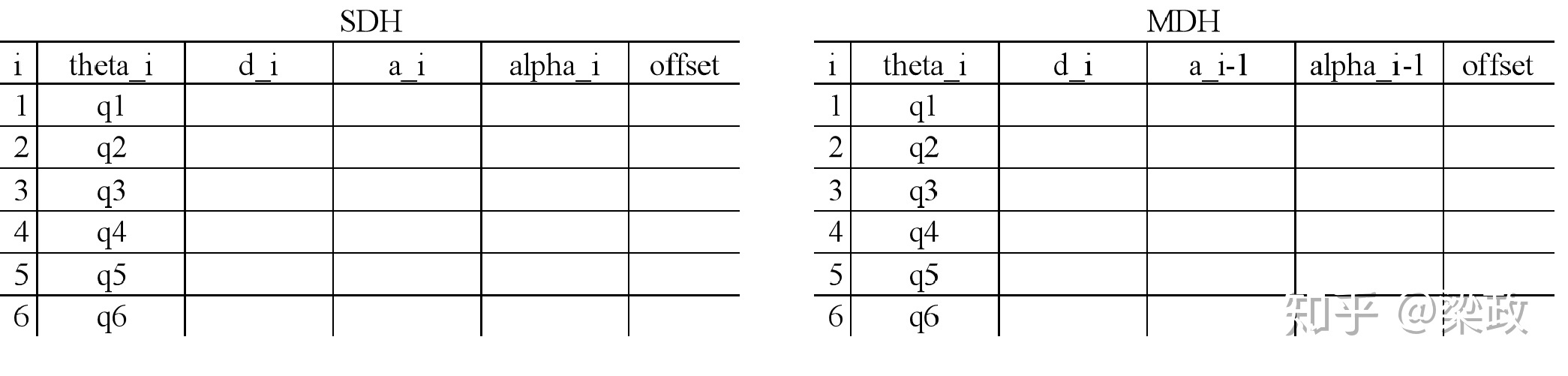
D-H法的简化方式很明确,就是将y轴位移和旋转的2个自由度干掉了,仅考虑x和z轴的位移与旋转。这样,6个自由度的位姿变成由4个参数来表示了。其中参数采用关节角(Joint Angle) 、连杆偏移(Link Offset) 、连杆扭转角(Link Twist) 、连杆长度(Link Length) 共4个参数来表述相邻两个坐标系的关系。
这4个参数可以分为两组。在移动关节下可变参数 是关节参数(Joint Variable)(移动关节的话,可变参数是 )。另一组是系统固有参数连杆参数(Link Parameters) 、 和 。
- [x] Edit By Porter, 积水成渊,蛟龙生焉。