摘要
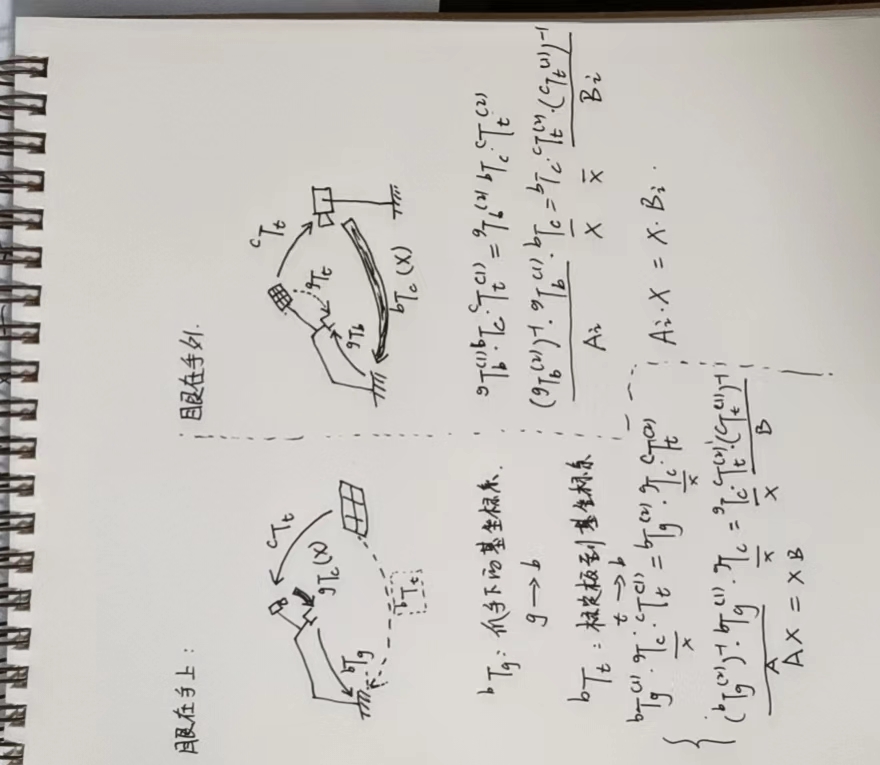
手眼标定一般用于机械臂和相机之间的坐标变换关系。手眼标定一般有两种情形,一种是眼在手上的手眼标定,相机固定在机械臂上,随机械臂一起移动;一种是眼在手外的手眼标定方法,相机固定在机械臂外,相机固定不和机械臂一起动。
眼在手上主要标定机械臂末端end到相机cam之间的转移矩阵;眼在手外主要标定相机和机械臂基座之间的转移矩阵。
- [x] Edit By Porter, 静以修生,俭以养德,非淡泊无以明志,非宁静无以致远。
1. 手眼标定方法介绍
1.1 opencv 手眼标定方法
目前可以实现手眼标定的方法有很多,比较常见的是opencv 的 calibrateHandEye()

表示 , 机械臂工具坐标到机械臂基座标的变换矩阵,这部分可以从示教器中读取,一般为3x3的旋转矩阵或者3x1的旋转向量,以及3x1的平移向量。
表示 , 棋盘格坐标系到相机坐标系的变换矩阵。这一部分需要相机识别棋盘格得到。
表示 , 相机坐标系到机械臂工具坐标的变换矩阵。这一部分是我们求解 的待求解变量X。
标定过程(眼在手上)如下
- 固定标定板,用来估计目标位置和相机坐标的关系
- 移动机械臂获取多组姿态
- 对每组姿态,使用机器人运动学记录机器人工具到基座之间的齐次变换关系
注意:标定过程是左乘,基座标没有变,和求DH参数的右乘是有区别的。
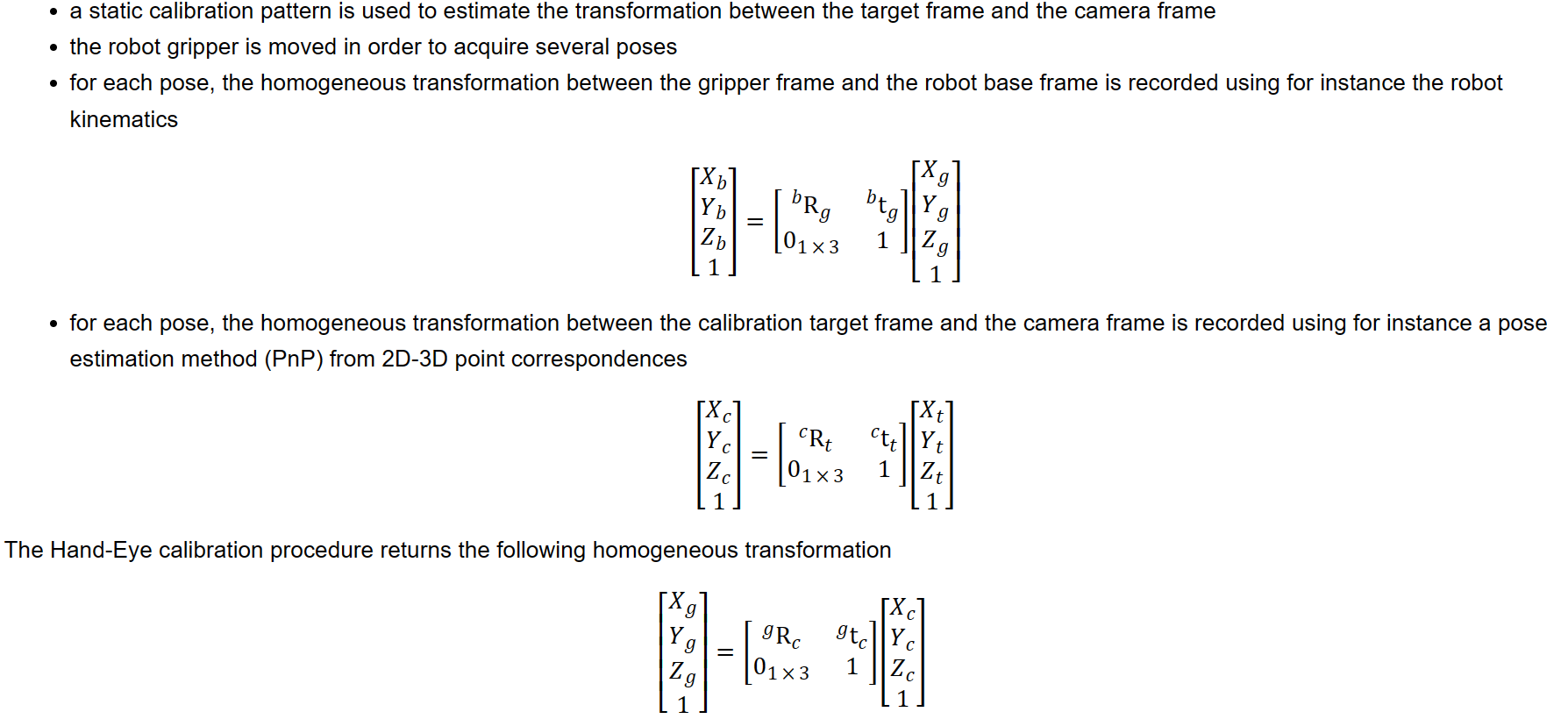
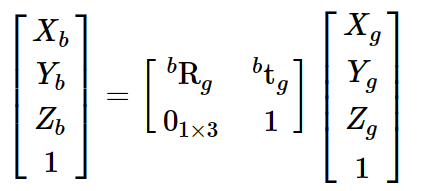
即,基座标 = [工具坐标下的基座标变换矩阵]*工具坐标;
即,相机坐标=[标定板下的相机坐标旋转矩阵]*标定板上的坐标
即,机械臂工具坐标=[带求解的相机下的机械臂工具坐标矩阵]*相机坐标
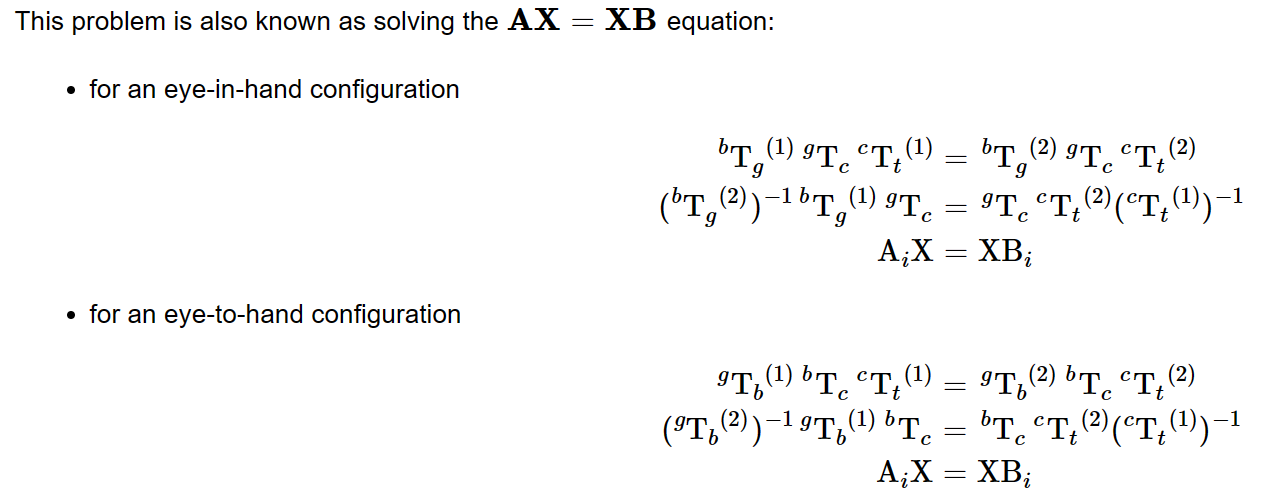
这个问题就是求解AX=XB;
对于眼在手上的标定AX=XB求解过程
参考 opencv calibrateHandEye() 函数的实现方法。
1.2 MoveIt 中的手眼标定
MoveIt Calibration软件包进行手眼标定
2. 手眼标定原理
这里有第三方实现的 手眼标定库
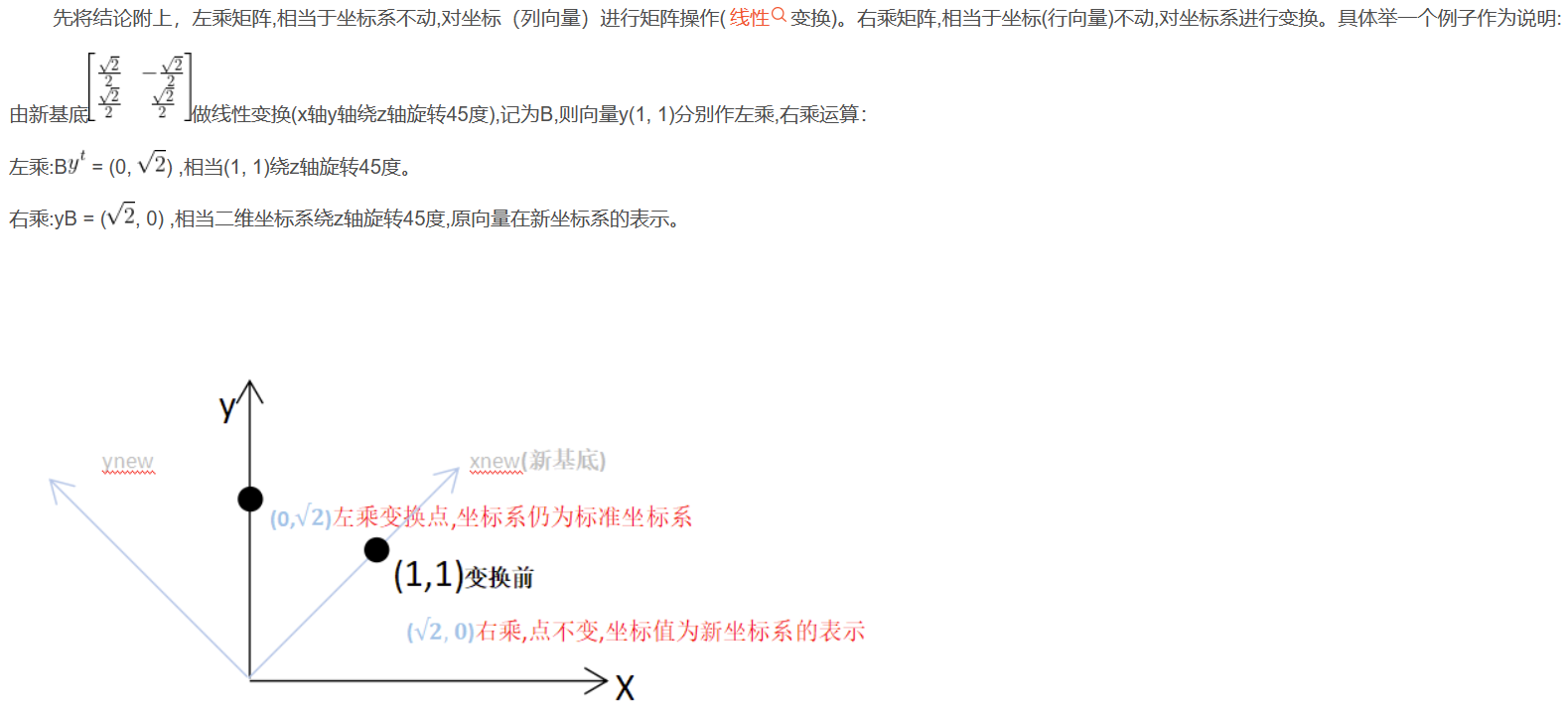
3. 左乘和右乘的区别
左乘矩阵,相当于坐标系不动,对坐标(列向量)进行矩阵操作(线性变换)。右乘矩阵,相当于坐标(行向量)不动,对坐标系进行变换。