摘要(优化中)
在SLAM的众多传感器解决方案中,相机与IMU的融合被认为具有很大的潜力实现低成本且高精度的定位与建图。这是因为这两个传感器之间具有互补性:相机在快速运动、光照改变等情况下容易失效。而IMU能够高频地获得机器人内部的运动信息,并且不受周围环境的影响,从而弥补相机的不足;同时,相机能够获得丰富的环境信息,通过视觉匹配完成回环检测与回环校正,从而有效地修正IMU的累计漂移误差。
相机与IMU之间的外参包括两部分:
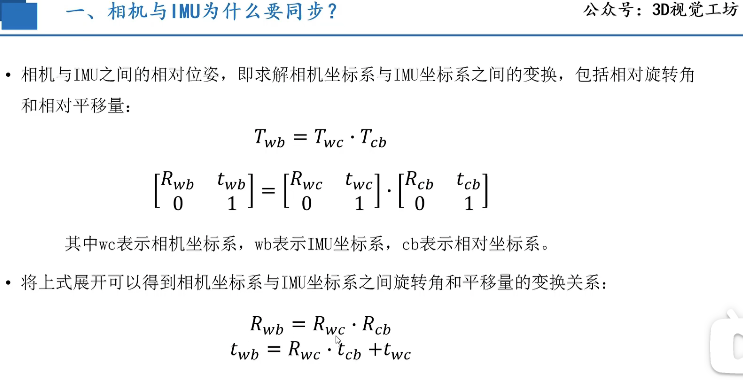
- 相机与IMU之间的相对位姿
如下图所示,相机与IMU之间的相对位姿值的是相机坐标系和IMU坐标系之间的变换,包括相对旋转角和相对平移量。

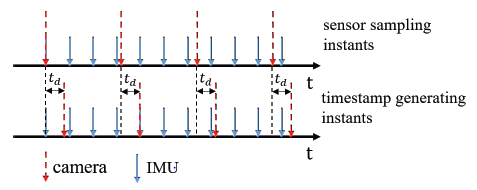
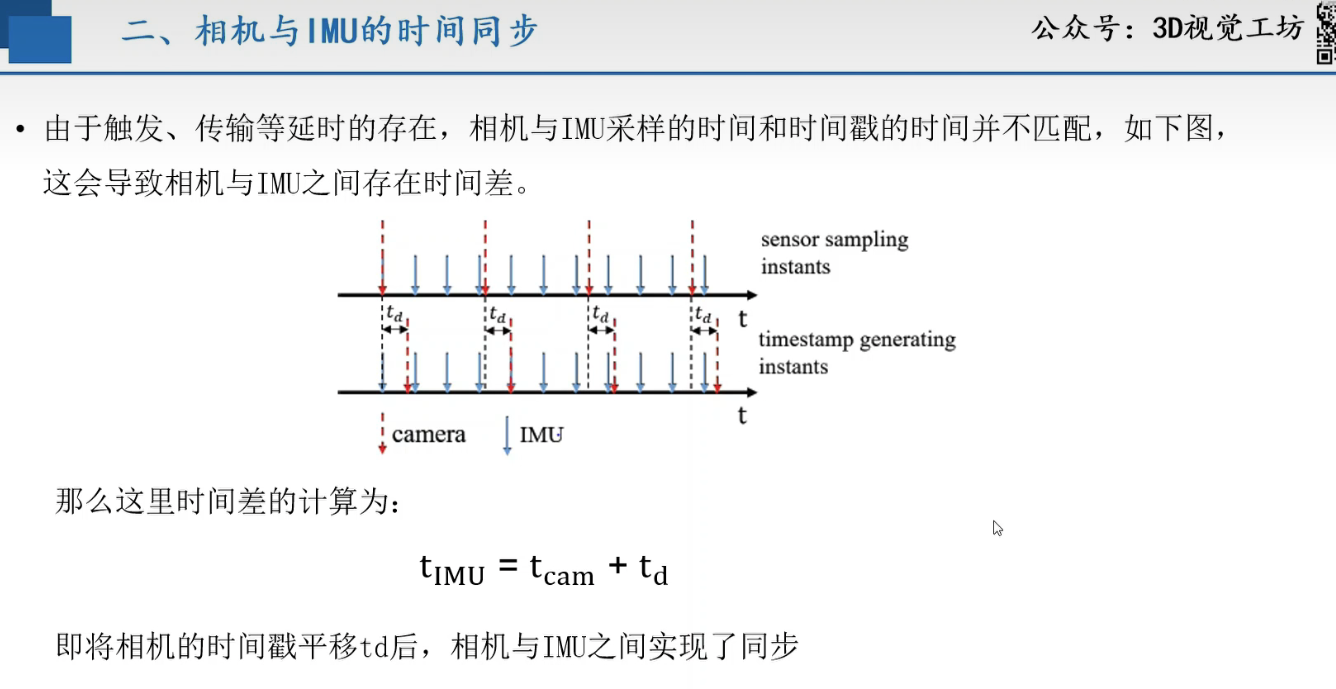
- 相机与IMU之间的时间差
由于触发延时、传输延时的存在,传感器的采样时间和时间戳的时间不匹配,如下图所示,从而导致相机和IMU之间存在时间差td。
- [x] Edit By Porter, 积水成渊,蛟龙生焉。
方法

标定工具介绍
由于VIO中,普遍使用的是精度较低的imu,所以其需要一个较为准确的内参数和noise的估计。Noise大家通常使用Allan方差进行估计可以得到较为可信的结果。
ros 里做标定的功能包有
1、 imu_utils标定IMU的内参,可以校准IMU的噪声密度和随机游走噪声
2、kalibr包标定相机的内外参数,相机与IMU之间的外参
3、 IMU内参标定工具imu_tk
https://github.com/Kyle-ak/imu_tk(或者https://bitbucket.org/alberto_pretto/imu_tk)
imu误差模型及校准理论参考
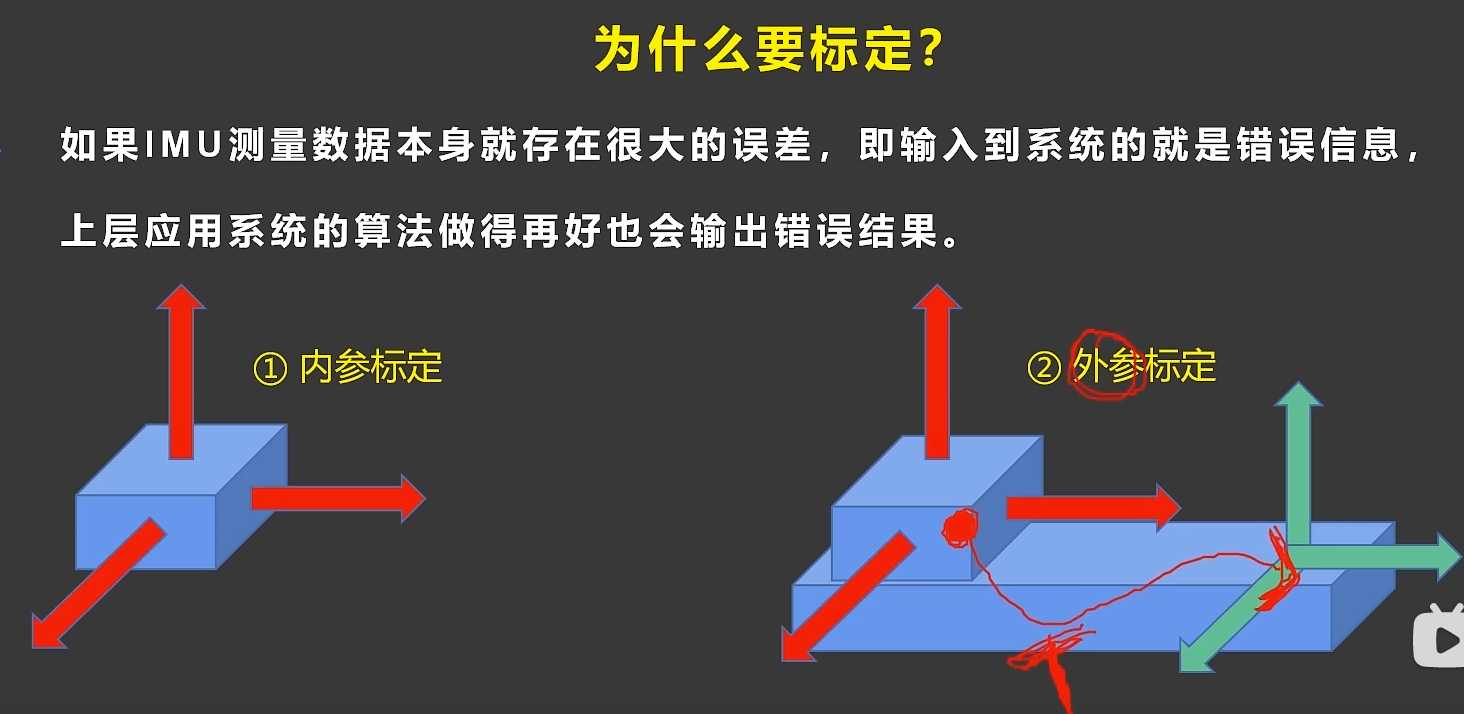
如果IMU测量数据本身存在很大的误差,上层应用做的算法再好,到时候都是有误差的。这就需要做一个标定的工作,来矫正敏感的误差,一种是内参标定和外参标定。
内参是相对imu内部来说的,系统内部产生的误差消除掉。
外参标定是相对内参标定来说的。
IMU标定算法流程,包括标定加速度计和标定陀螺仪。可以参考这个博客
相机和imu 的外参标定理论
粗略估计camera与imu之间时间延时
已知每一帧图像的3D-2D对应,可以算出每一帧camera的pose。用这些离散的pose构造连续的B-spline,就可以获取任意时刻pose。
注意这里对pose参数化采用六维的列向量,分别三维的位移 和旋转矢量 。对位移和旋转矢量分别求一阶导、二阶导可以得到速度与加速度:
利用camera的样条曲线获取任意时刻camera旋转角速度,而陀螺仪又测量imu的角速度。忽略偏置和噪声影响,两者相差一个旋转,且模长相等:
这样用camera和imu测量出来角速度随时间原始曲线:
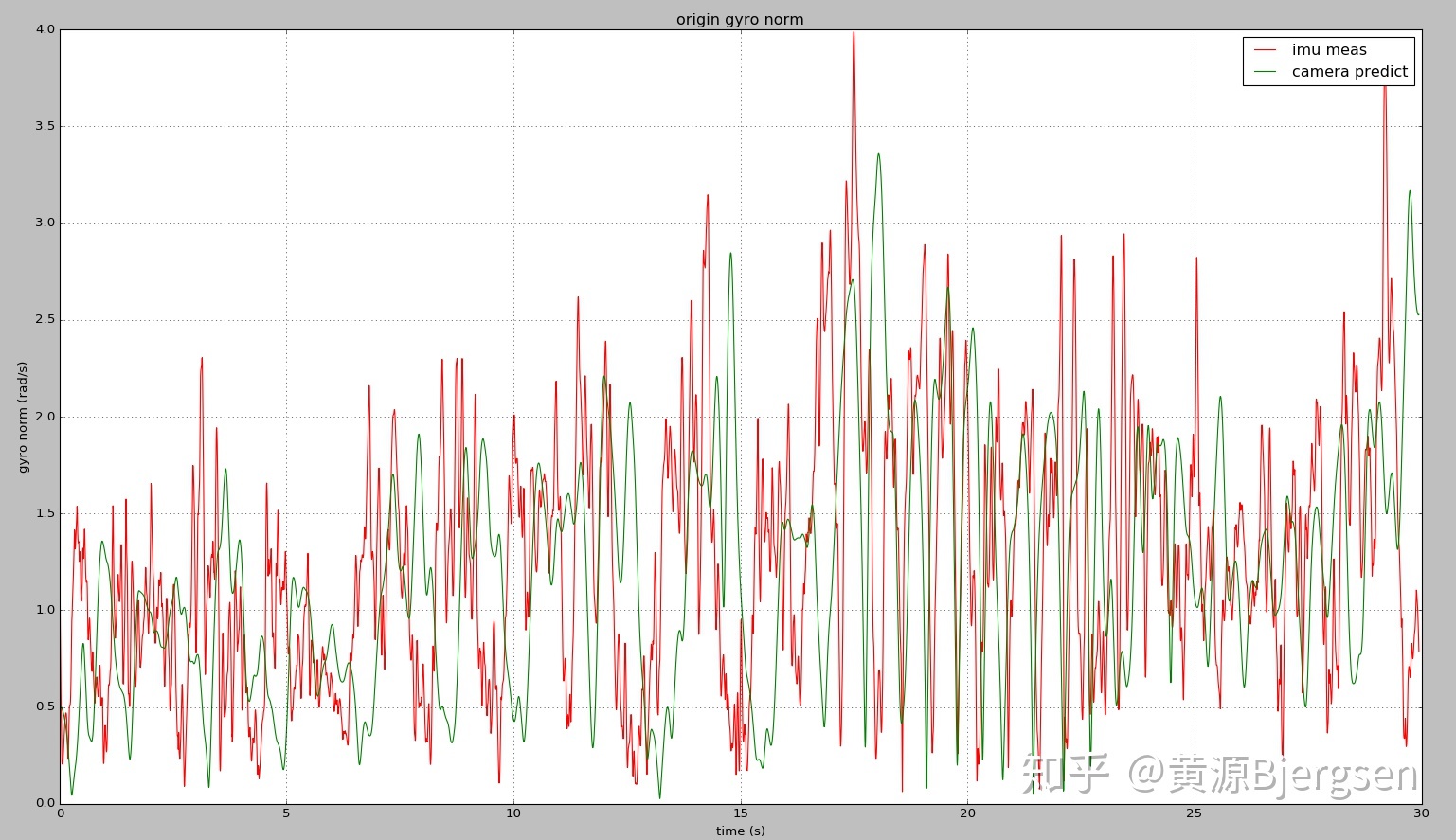
现在利用两个曲线的相关性,可以粗略估计imu和camera时间延时:
现在利用两个曲线的相关性,可以粗略估计imu和camera时间延时:
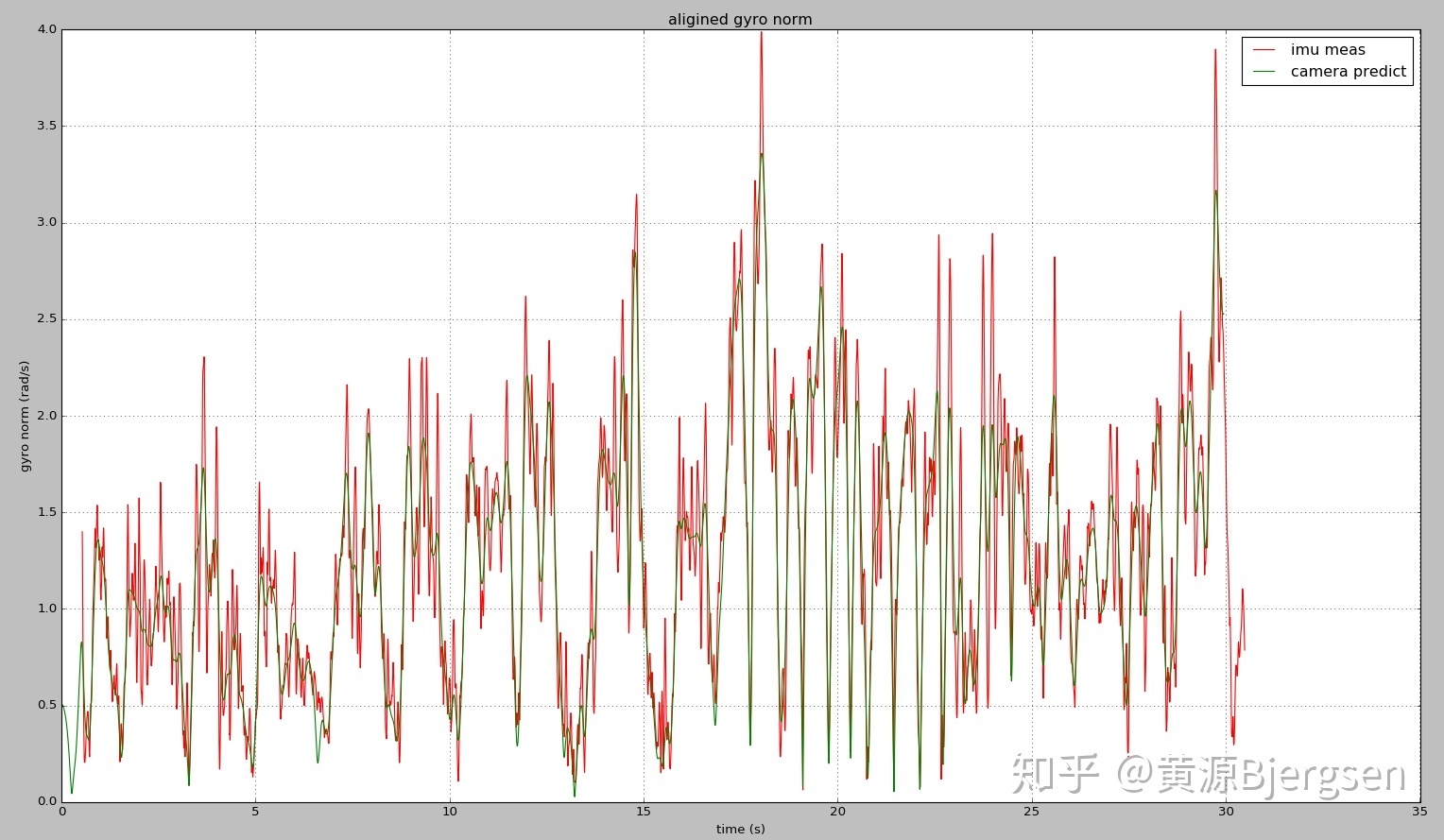
可以看到利用相关性,可以把时间延时误差缩小到1-2个imu周期范围内。
相机和imu的位姿同步(空间同步)